Biomimicry Changes the Future of Robotics
Robotic engineering continues to evolve swiftly, yet developing a robot that can detect and pursue odors has proved difficult for the science. Shunsuke SHIGAKI, an assistant professor at Osaka University, seeks to address the problem by analyzing the scent-detection abilities of silk moths. To understand how airflow or sight affect their perception of scents, he built a VR unit for insects in order to gather data. The algorithm created from it allowed him to program a robot with similar odor-detection capabilities. Now, he attempts to give it enough environmental adaptability to navigate obstacles, or operate outdoors. In this episode, we follow SHIGAKI's efforts to create a high-tech robot with abilities learned from actual organisms, so that it might eventually be put to use in search and rescue operations.

Transcript
Within tiny bodies, insects possess abilities that are nothing short of astonishing.
Take... flight.
An insect's power of flight is said to surpass the mobility of anything developed by human engineering.
To survive a range of harsh environments, all insects carry unique strengths.
Moths are known for their exceedingly precise sense of smell.
Males track females of the same species from kilometers away based on their scent alone.
French entomologist Jean-Henri Fabre discovered this truth in 1904.
And yet, in over a century since, scientists were unable to recreate the mechanism enabling such a feat.
Accepting this challenge is Shunsuke Shigaki, an assistant professor at Osaka University.
Shigaki used his own unique methods to analyze the behavior of moths in pursuit of a scent.
This was the device he developed just for that purpose:
A virtual reality chamber for insects!
Through his exhaustive research into the senses of moths, Shigaki seeks to build the ultimate robot.
I'd like to use VR to extract the capabilities
of organisms to utilize artificially.
I began this research to see if these abilities
could be recreated in a robot.
Biomimicry, the process of reproducing the traits of organisms artificially,
is capable of repurposing the moths' behavior.
For all its sophistication, our science couldn't
replicate that scent tracking.
And yet insects are capable of it.
It's just fascinating.
Now, scientists are learning these elusive secrets from the insects themselves.
Biomimicry Changes the Future of Robotics.
In this episode, we study alongside the researchers delving into the secrets hidden within these minute creatures.
In the event of natural disasters such as earthquakes and typhoons,
search and rescue dogs are used to sniff out survivors who may be trapped beneath the rubble.
Their keen sense of smell is a literal lifesaver.
But for humans and canines alike, rescue missions present very real dangers.
To limit these risks as much as possible,
researchers are developing a robot that can seek out targets using their odor.
Shunsuke Shigaki is an assistant professor at Osaka University.
Shigaki's field of study is control engineering,
which deals with the precision of machine functions.
As for his current subject of research...
These are silk moths.
Silk moths, insects known for their ability to produce silk fibers.
Dogs are useful because of the variations
in behavior they're capable of.
They possess a cerebrum, and a complex
nervous system.
Silk moths don't have those, so they reach
mates just through reflexive actions.
The moths' movements through simple reflexes belie amazing capabilities.
Silk moths have a long history of being bred for the commercial production of silk.
This sericulture began in China, where's it's believed to boast a history of more than 5000 years.
The moths were bred to produce ever whiter and more attractive silk.
By the time a silkworm matures into a moth,
its body is solely devoted to achieving reproduction.
It can't fly, or even eat.
The mature male silk moth devotes itself entirely to reaching its partner.
Its guiding light in this journey is the pheromones secreted by the female.
The male moths are equipped with comb-shaped antennae that catch the scent of their mate.
Researchers performed tests to see just how effective this trait may be.
On the right is the female, and on the left, the male.
As soon as the cover is removed, the male reacts to the scent.
It wastes no time in seeking out the female.
The silk moth's compound eyes can react swiftly to movement,
but aren't considered capable of precise vision.
It's hard to theoretically determine the source of
a specific odor, such as a gas leak.
That's why we began researching robots
that use biomimicry.
To locate an invisible scent...
Replicating this ability artificially proved challenging.
Exhaustive study of the moths' capabilities would be necessary,
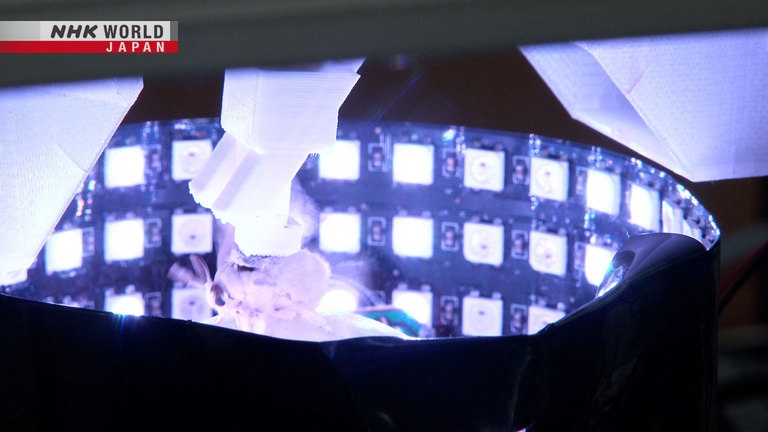
but Shigaki invented a device for the task.
With this system, we stimulate the moth over a sustained period
with odor, airflow, and sight.
The moth is inside this measurement device.
The system creates the illusion that it's
moving towards a mate.
The moth is secured at the center of the device.
The flashing LED lights simulate forward movement,
lighting up to make the moth believe it's walking.
The scent is released directly above the antennae,
and based on the direction and intensity of the airflow, the distance from the female is recreated.
It's a VR suite just for moths.
This is a virtual environment through
which the moths actually move themselves.
A scented breeze drifts through the simulated environment.
The male moth reacts, and begins walking.
In order to test just how the moths move in response to the air strength and direction,
as well as the intensity of the scent, detailed data is sampled 30 times a second.
With the invention of this device,
it became possible to understand how the moth's movement is affected by different conditions.
We performed repeated trial and error to provide
stimuli matching the actual research environment.
It needs to be totally realistic in order to work,
so it was very time consuming.
We spent more than a year, after which
we were finally able to add in various conditions.
Having gathered a wealth of reliable data,
the team succeeded in programming an algorithm that realistically simulated the moths' behavior.
The top algorithm is the one we proposed,
while the bottom is the previously used one.
The scent appears along the middle line.
Moths used to go to the edge and then return,
but with our model, they stay in the middle.
The scent tracking capabilities of the moths had been analyzed in a previous study.
But when compared to the previous algorithm,
the accuracy of Shigaki's model in recreating their behavior became clear.
It proved itself with a higher success rate in reaching the scent.
At the time, they used a video camera to record
their movements manually, frame by frame.
That massive amount of work led to
the algorithm for scent tracking.
Naturally, it was essential as a foundation
for our research.
Three decades ago, a researcher performed the world's first study on scent tracking in silk moths.
Professor Ryohei Kanzaki,
of the University of Tokyo's Research Center for Advanced Science and Technology.
Kanzaki is a pioneer of the field who has spent over 40 years examining how the moths' brains react to scents.
Kanzaki feels a sense of inspiration and possibility toward
the mysteries that remain concealed within the insects' brains.
For all its sophistication, our science couldn't
replicate that scent tracking.
And yet insects are capable of it
with their limited neurons.
It's just fascinating.
In terms of the scientific technique we use going ahead,
one way is to rely on the analyses we've come up with.
Another way is to solve problems using the techniques
that insects have gained through evolution.
The former tends to place a strain on nature.
But insects perform their tasks while
coexisting with the natural ecosystem.
I think it's possible that we could develop that sort of engineering.
I feel that Professor Shigaki's research
has a part to play in that.
Shunsuke Shigaki first came into contact with robots 20 years ago, at a local event.
There was this local workshop to build
soccer-playing robots.
I asked my parents to let me join it.
I learned about a competition called RoboCup
that promotes development of AI and robotics.
In 2002, the international robotics competition was held in Shigaki's home prefecture, Fukuoka.
We share in the dream of RoboCup,
and pledge to compete fairly.
The competition involved creating robots capable of autonomous movement.
To foster interest in AI and robotic engineering,
a junior division was included for children.
Take a look at this robot here...
The workshop held in preparation for the championship was a fateful experience...
Shigaki recalls it being the moment he fell in love with robotics.
As if to prove his enthusiasm,
he was crowned world champion with his very first entry into the competition.
I really got into robots with that, and RoboCup
let me communicate with all kinds of people.
Enjoying working with robots, I took part
in RoboCup from grade school to technical college.
Over the course of a decade,
Shigaki enjoyed building soccer robots together with his teammates.
After honing his skills, an important question occurred to him...
What if I took that soccer robot somewhere
else, like onto a basketball court?
Even though it's a similar field, I knew the robot
wouldn't be able to function outdoors.
But humans can play soccer on any kind of field.
It led me to consider what the functional difference is
between humans and robots.
In the present, robots have grown ever more advanced.
Your order is ready.
But their abilities remain limited to distinct environments.
Their effective use is only possible in the areas for which they were designed.
In order to overcome this hurdle, Shigaki enrolled at the Tokyo Institute of Technology.
One of the professors here has become known for his work on environmental adaptation in robotics.
Hello. Nice to see you again.
He's popular. He gets a lot of invitations.
Professor Daisuke Kurabayashi was Shigaki's mentor during his student years,
and the one who led him to the current experiment.
Here it is.
It's just like I remember.
I removed some equipment.
Although he entered with the intent of learning robotics,
Shigaki spend countless days at this lab studying insects under a microscope.
It wasn't quite the research that he'd originally envisioned for himself.
I convinced him to come.
That we couldn't do this with
just artificial constructs.
I told him we needed to consider the brain
and nerves to make an intelligent robot.
He based his research on that concept.
It was very persuasive.
I made a shift in my focus at that point,
and it ended up being to my benefit.
Professor Kurabayashi really impressed me.
Shigaki's interest in environmentally adapting robots was piqued.
Here, he learned the basis of studying systems from living organisms.
So what kind of research does Kurabayashi have in his sights now?
Our objective in our research is
to control multiple robots more simply.
When there are a lot of robots involved,
sending individual commands is a hassle.
It's better if a single command can be interpreted
by multiple robots, doing the work in unison.
But how best to construct that system?
We got a hint from the slime mold.
The "true slime mold," also called the "plasmodial slime mold,"
is a formless mass that despite being a single-celled organism,
can form clusters of 1 meter in size.
We lit it from below to photograph it from above.
The black areas are where the mold is thick,
and the light areas where it's thin.
The slime mold is an organism that periodically
changes the thickness of the jelly it's composed of.
In scientific terms, objects that carry out periodic movement are called "oscillators."
Oscillators interact and synchronize with other similarly moving objects.
Even a candle's flame can be one.
By drawing two candles nearby, their flames oscillate and interact.
Kurabayashi decided to put this function to use in manipulating robots efficiently.
If we applied them as control devices, we could
easily control a large number of robots.
That was our rationale.
His experiment yielded results.
Each of the robots is trying to follow the single
leader robot beyond the wall.
They're able to change the shape of their group
in order to efficiently slip through.
The strategy allowed one single command to be issued to the leader,
while even without commands, the other robots know to follow thanks to the oscillations.
Consider a situation with a large group of robots.
Even if the ones in the rear can't see the leader,
they can still preserve order this way.
The leader signals with light based on the situation,
so it's easy to keep them organized.
This was a new achievement for robotics.
Kurabayashi's firm belief is that biomimicry will allow robots to increase their capabilities dramatically.
Assistant Professor Shigaki has made considerable progress in his efforts
to refine the odor-tracking algorithm using VR.
The time has come to put an algorithm that performed well in simulations to the test with an actual robot.
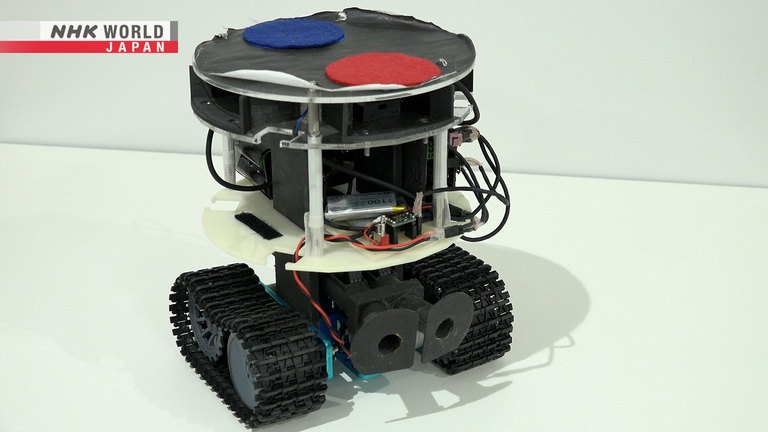
This is a robot, and it's programmed with
the algorithm modeled in virtual reality.
It can be moved with a compact controller.
The program is very economical and effective.
As the silk moths have two antennae,
the robot has two alcohol sensors here.
This robot plays the role of the silk moth.
Since sensors like the moths' antennae can't be achieved with currently available technology,
industrial alcohol sensors are used instead.
Airflow sensors are also attached in each of the four directions.
It lacks other equipment common to testing robots, such as distance sensors or cameras -
It was designed to respond to odor and airflow alone.
Just like the moths, the robot is simple.
To gauge what their effective scent detection
is based on, we used a deliberately simple robot.
Now comes the critical moment for Shigaki's robot,
to see whether it can respond as hoped.
Ethanol alcohol is placed at a distance of 2 meters.
The odor and sensors are only an approximation of the moth's physiology...
But after 1 and a half minutes, the robot succeeds with flying colors.
As for the pattern of the robot's movements...
They're almost identical to those of a real moth!
Next comes a greater challenge.
An obstacle is placed between the robot and the source of the odor.
The robot has no trouble navigating around the barrier to reach its goal.
More proof that the moth's functions have been properly replicated.
All the tasks are completed without cameras or distance sensors,
acting only on the limited information carried on the wind.
The adaptivity found in the animal kingdom has provided a new solution,
the likes of which scientific minds might have remained unaware.
This robot isn't much more than a toy,
so I'd like to upgrade to a more practical one.
I think it competes well with the moth
in a fixed environment.
Actual insects react diversely to different stimuli,
such as distinguishing between a flower and a mate.
I'm very interested in the prospect of
replicating that artificially.
At last it's time for Shigaki to confront the first question that lead him to study biomimicry in robotics.
Could a robot effectively perform its functions in a completely new environment without any advance preparation?
It did surprisingly well.
It seems that incorporating the moths' abilities has made environmental adaptation possible even outdoors.
The next step will be to place the robot
further away, where it may or may not encounter the odor.
We predict an environment where the robot
may be some distance away.
We need to look at how the robot initially acts,
and how it will perform when coming across an odor.
We've managed to succeed outdoors by
gradually predicting these things.
Next we'll introduce wider variables and obstacles
to expand the range of the system.
Each step brings us closer to social implementation.
The odor-tracking once thought impossible for human science
has been all but realized thanks to Shigaki's efforts.
With the tiny trek of the silk moths, he continues his lifelong pursuit.