Special Episode: Helping Prosthetic Hand Users Become Choosers
A prosthetic hand substitutes a limb that may have been missing at birth or that is lost later in life. They can be classified into several types according to their functions, and the myoelectric prosthetic hand is known to be the most functional. It has a sensor that detects weak "myoelectric signals" generated when muscles contract and converts the signals into hand movements. Most myoelectric prosthetics available in Japan are made overseas and are hard to obtain. Moreover, they cost over US$15,000 and weigh around 1kg, making it unsuitable for the average Japanese person. For such reasons, most prosthetic hand users in Japan end up settling for cosmetic prosthesis which are lightweight and affordable. Masahiro YOSHIKAWA, an associate professor at Osaka Institute of Technology, is taking on the challenge to tackle this problem by developing an affordable, lightweight yet highly functional electrically-powered prosthetic hands. Find out how YOSHIKAWA is making prosthetic hands more accessible by using 3D printers and his original "muscle bulge sensor."



Transcript
Prosthetic hands, they are used by people who are missing their hands from birth or because of accidents.
There are various types of prosthetic hands, which users can choose according to their lifestyle and usage.
That being said, every prosthetic hand has its advantages and disadvantages, and no single one can fully satisfy all users.
If you hold something with your fingertips,
it weighs down the other end like a lever.
Electrically-powered prosthetic hands offer many functions, but are expensive.
Cosmetic prostheses are lightweight and affordable but do not have a functional role.
Although a good prosthetic hand is an essential part of the user's life, people often end up settling for one that isn't exactly what they want.
In an effort to improve this situation, a researcher is working on developing a variety of prosthetic hands based on new ideas.
This is Masahiro Yoshikawa from the Faculty of Robotics and Design at Osaka Institute of Technology.
The high cost is preventing users
from choosing a prosthetic hand that moves.
Most settle for the cosmetic prosthesis.
I want to give users more options
with various types of prosthetic hands.
Today, we'll take a close look at Yoshikawa's research to develop new types of prostheses that meet the needs of the users.
Currently, an estimated three million people worldwide are using or are in need of a prosthetic hand.
In Japan, the number is said to be around 80,000.
Generally, there are four main types of prosthetic hands.
The most commonly used is the cosmetic prosthesis.
Although they cannot be actively moved, they are affordable, lightweight and resemble a real hand.
Work-specific prosthesis, supports the user with tasks that have specific requirements.
This is a body-powered prosthesis.
It is operated by attaching a harness to a body part such as the shoulder of the opposite side.
The hand is controlled by pulling on the connected cables.
And this is a myoelectric prosthesis.
There is a metal component with a motor, inside the hand.
It uses a sensor that detects electric signals generated by muscle movements to activate the motor.
When the brain gives a command to move a finger or hand, a slight amount of myoelectric signal is generated in a specific part of the arm.
These are the sensors that capture the signal.
Myoelectric signals generated by the residual limb are detected and the motor converts the signals into fingertip movements.
Although it is a very advanced system, only 3% of prosthesis wearers in Japan are using myoelectric prosthesis.
Yoshikawa says there is a clear reason why this cutting-edge technology is not being widely adopted in Japan.
It's a matter of cost.
The least expensive is around US$15,000.
Plus, they're heavy.
The majority of myoelectric prosthetic hands available in Japan are made in the United States or Germany, the top countries in this field.
One hand weighs approximately 1kg, which is not ideal for the average Japanese person.
From the user's standpoint, adding 1 kg
to the area of the absent limb is heavy.
How can users get a low-cost, lightweight, and highly functional electric prosthetic hand?
Yoshikawa begins his research in 2011.
The first step was to review the conventional manufacturing process.
Normally, a prosthetist makes the socket by creating a mold using plaster.
The socket is a perfect fit for the user.
Not only does this process take time, they need to make a new socket every time the wearer gains or loses weight even slightly.
This is one of the reasons for the high cost.
Yoshikawa thought that the process could be simplified using a 3D printer.
If the socket could have more versatility and be fabricated using a 3D printer, it would eliminate the need to make individual molds.
By cutting the time, it would also lead to significant cost reduction.
Yoshikawa boldly set out not only to reduce the cost, but also to minimize the appearance.
He focused his attention on the five-finger prosthetic hand, which was the standard for myoelectric prosthesis.
Although the appearance of the five-finger prosthesis was flawless, there were issues in practicality.
The fingers can only move in one direction, so it was limited to grabbing objects with a particular shape or angle.
Yoshikawa decided not to get fixated on the five-finger design and developed a three-fingered prosthetic hand that gathers in the center.
The three-fingered structure was common in robotics
and can grasp objects with stability.
However, three-fingered prosthetic hands
with concentric grippers were not available.
I thought, "This could be it."
With three fingers, a person can accomplish most of the lighter tasks in daily life, such as grasping objects and using tools.
The only problem was its appearance.
The three-finger form is far from
a real human hand.
But if it's considered a tool with a cool design,
there may be a demand for it.
Yoshikawa worked with staff at care facilities as well as product designers to solidify his image.
3D printers were used, but not for all the parts.
The biggest challenge was the fingertip.
Since 3D printers create shapes by extruding material through a thin nozzle, the types of materials are limited.
Fingertips need to have a good grip, yet be soft as a human skin.
Yoshikawa could not create such fingertips with the 3D printer.
Yoshikawa sought out a company that could produce ideal parts to attach onto the fingertips.
He visited a plastic resin company in Kyoto.
The company had expertise in the medical field, including the production of silicone organ models.
Yoshikawa thought they would be able to reproduce the delicate nature of the human fingertip.
The fingertips need to be soft,
so they can grip without crushing the object.
We also need to adjust the friction
to make it less slippery.
In our vast experience making organ models,
we have various soft resins to choose from.
We develop our products using feedback
from real users so we can meet their needs.
Based on 20 resin samples of varying materials and hardness, they made multiple prototypes of different thickness and shape.
And finally, the ideal fingertip cap was created.
The most essential aspect of developing the new prosthesis was to redesign the complicated thus costly myoelectric mechanism.
Normally, the sensor is placed so that it directly touches the skin to detect the myoelectric signals for moving the hand.
Myoelectric signals are generated in places where muscles contract.
A microcomputer detects the signals and converts them into movement.
Although it is an incredible system, there were several drawbacks.
During training, we look at a monitor
to check for myoelectric signals.
Without the monitor, it's hard to know
if you're generating the signals.
If the missing limb is a birth defect,
such movement is difficult to visualize.
Another issue was sweat.
When users sweat inside the device, it can cause a short circuit between electrodes and impede the detection of myoelectric signals.
As a result, the device can malfunction or stop working.
How can it be improved?
Is it possible to lower the cost of the sensor, make it easier to use, and not be damaged by perspiration?
Yoshikawa turned his attention to the muscle bulge movement.
His idea was that if the height of the muscles could be measured as a change in indistance, that signal could be converted into motion.
To measure the distance, Yoshikawa used a photoelectric sensor.
A photoelectric sensor uses infrared rays to detect the distance to an object and the presence of any obstacles.
They are used in many electronic devices and are available for about 1 US Dollar each.
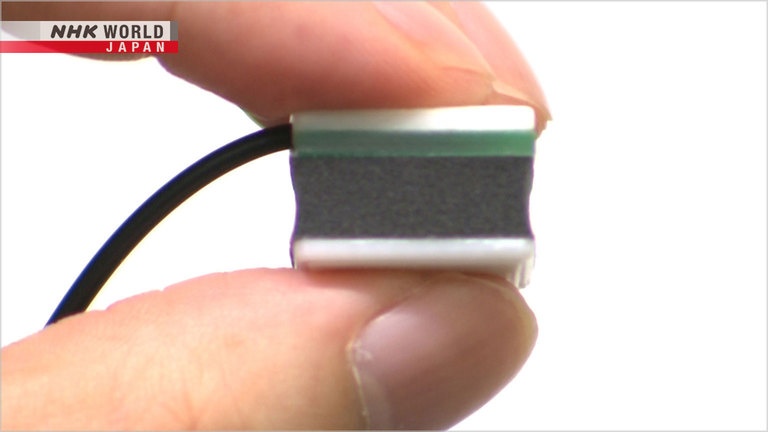
This is the muscle bulge sensor developed by Yoshikawa.
The elasticity of the sponge is used to absorb the slightest muscle movement.
The distance is determined by emitting infrared rays from the device and measuring the amount that is reflected back.
By placing the device inside the socket, the muscle bulge will push against the sensor and create a change in distance.
When this change is detected, it will activate the motor.
Since the sensor does not need to be placed directly onto the skin, that solves the perspiration issue.
The sensor detects bulges as small as 0.5 mm.
While the price of a myoelectric sensor is around 700 US dollars per unit, this muscle bulge sensor can be made with about 5 US dollars.
This is a big advantage in the effort to reduce the cost.
Yoshikawa also used a 3D printer for the main body of the device to lower the cost.
5 different sizes of arm sockets were prepared, each with a slit to easily accommodate to the thickness of the user's arm.
In 2015, an electrically-powered prosthetic hand was created using a 3D printer, which at the time was the world's first.
The cost per unit was about 1500 US dollars, less than one-tenth the cost of a conventional myoelectric prosthetic hand.
It also weighed nearly one-third.
Yoshikawa successfully reduced both the weight and the cost, greatly easing the burden on the user.
Imai Tsuyoshi was born without a left forearm.
He uses Yoshikawa's prosthetic hand.
Most of the tasks he does with his normal hand can be performed using the prosthesis.
The amount of force is adjusted by the muscular bulges.
A heavy object such as an apple can be held firmly with a large bulge movement, and a small bulge enables the user to hold a delicate object such as a tomato.
He says he rarely has any trouble in his everyday life.
Tying shoelaces.
His ability to grasp and hold objects is comparable to a human hand.
At first, you'd think that five fingers are better,
but the fingers don't move freely.
three fingers have a better grasp and are easier
so I prefer the three fingers.
I'm grateful we have new technologies.
Yoshikawa is an associate professor in the robotics department at his university.
However, when he was a student, his research focused in the field of cognitive neuroscience, which had nothing to do with robotics.
After graduation, instead of pursuing a career as a researcher, he joined an IT firm.
There, he worked in product planning and marketing, which were not even related to science.
During those four years in the firm,
I realized I wanted to be a researcher.
So I went back to school as an adult.
During his second university life, he chose the path of computer science.
Since he went through the trouble of quitting his job, Yoshikawa wanted to do research that would benefit people.
He chose to study prosthetics.
He learned programming from scratch, and eventually was able to develop his own complex software to control seven different movements in the arm using myoelectric sensors.
However, as he continued his research, Yoshikawa began to feel frustrated, because no matter how good the software, he could not find a suitable hardware to use it on.
In order to create the prosthetic hand he envisioned, hardware research was necessary.
Developing software and hardware are completely different skills.
Fortunately, he was not a novice in this field.
Hardware was related to his hobby since childhood.
Building plastic scale models!
I've always loved it and I still do.
At first, my wife was surprised at how many.
Now, she's supportive.
I've learned a lot from making plastic models.
How to put the parts together
or how to make the joints move.
When I'm making plastic models at home,
I tell my kids, "It's part of my job."
But of course, making a real prosthetic hand requires a considerable amount of knowledge.
To seek advice and technical expertise, Yoshikawa consulted engineers at one of the leading prosthetic arm manufacturers in Japan, whom he has known since he was in university.
The manufacturer also makes custom-made prostheses, so they are able to get feedback from the users directly.
During university, I saw my first
body-powered prosthesis at a conference.
They showed me how it worked.
To Yoshikawa, this partnership is essential in developing prosthetic hands, as they provide him with valuable information from the users.
We make prosthetic hands,
but it's not easy to develop something new.
Prof. Yoshikawa provides us with various ideas.
I hope he'll develop quality prostheses
utilizing Japan's technologies.
I'd like to offer that to clients worldwide.
In less than 10 years of making prosthetic hands, Yoshikawa has achieved many accomplishments.
He has succeeded in developing a low-cost, lightweight electrically-powered prosthetic hand, but every now and then, he hears people wanting a prosthetic hand that looks and functions more like a real hand.
Now, Yoshikawa is taking on the challenge of using a 3D printer to develop a lightweight electrically-powered prosthetic hand with 5 fingers
that's mounted with a muscle bulge sensor.
Japan is said to be one of the world's best for cosmetic prosthesis technology.
This is a silicone prosthetic glove made by a Japanese manufacturer.
It's hard to tell apart from a real hand.
Now, the question is what kind of electrically-powered prosthetic hand to insert into this glove.
I thought about using a separate motor
for each finger, but it's too heavy.
Next, I used a single motor
to pull 4 fingers with a wire.
However, bending the fingers with the silicone glove on, requires much power.
The motor inevitably became larger, making the prosthesis weigh more than 500 grams.
To reduce the weight to a user-friendly 300 grams, Yoshikawa tried using pneumatic artificial muscles, commonly used in power-assisted gloves.
Pneumatic artificial muscles are tubes made of a special elastic material that can reproduce the movements of muscle contraction and expansion by applying air pressure.
This would eliminate the need for a heavy motor.
One motor alone weighs about 100 grams, but the pneumatic muscles are merely 20 grams for all five fingers.
So how well does it work?
As with the three-finger prosthetic, the open and close motions can easily be controlled by the muscle bulge sensor.
The user can grasp or pick up most objects without any problems.
However, it isn't very good at holding objects such as a pen.
The disadvantage of the five-finger prosthetic hand is that it can do less than a three-finger prosthetic, because of the restrictions it has with the positioning and the movement of each finger.
In pursuing a lightweight, low-cost prosthetic hand, Yoshikawa believes that the five-finger model still has many challenges and that more time is needed to
create something that will satisfy the users.
Yoshikawa's research is based on the principle of "inclusive design," which focuses on the perspective of what people with disabilities really want.
I don't pity them.
I sympathize with their inconvenience.
My motivation comes from wanting to
create tools that improve their inconveniences.
In an effort to improve such minor inconveniences, Yoshikawa is also involved in creating simple, yet unique prosthetic hands.
These may look like toys, but...
These are task-specific attachments
for young children.
You screw it onto a socket
and put a pen in it.
It lets you to write.
This is an attachment for holding paper when making crafts.
The trick is that the paper bends upwards.
This stabilizes the paper, and lets you cut easily.
If you replace the attachment with this one, you can jump rope.
Now, take a look at this attachment.
What do you think it's used for?
It's used for hammering a nail.
I talked to an adult
who was born with a missing limb.
As a child, he felt ashamed
that he couldn't hammer a nail.
So I made this for children like him.
It's one approach to make
sophisticated prosthesis.
But we're taking the simple approach,
minimizing the necessary functions.
This is also science.
At the core of Yoshikawa's research is the desire to create prosthetic hands that people want to wear, rather than something people wear because they have no other choice.
My goal is for users to choose prosthetics
from a wide range of options.
Like a pair of glasses,
they could have more than one.
Imagine a world where users proudly pull out their prosthetic hand from their bag and reattach them with a different one, without feeling self-conscious.
That day may be just around the corner.